Disadvantages Of Pi Controller : 9 2 P I D Pi Pd And Pid Control Engineering Libretexts - This application note describes the conversion from the continuous to the discrete time domain, which is essential for every implementation on a digital processor.
Disadvantages Of Pi Controller : 9 2 P I D Pi Pd And Pid Control Engineering Libretexts - This application note describes the conversion from the continuous to the discrete time domain, which is essential for every implementation on a digital processor.. Pi controllers have two tuning parameters to adjust. This process continues while the controller is in effect. Integral action tends to increase the oscillatory or rolling. A pi controller could improve relative stability and eliminate steady state error at the same time, but the settling time is increased(system response sluggish). In this paper, the design of an optimal fuzzy gain scheduling of pi controller combines the merits of the sliding mode control and the fuzzy inference mechanism is proposed.
This application note describes the conversion from the continuous to the discrete time domain, which is essential for every implementation on a digital processor. Disadvantages of proportional integral derivative controller (pid controller) for free materials of different engineering subjects use my android application named engineering funda with following link: Thus, pi controllers provide a balance of complexity. Proportional integral controller sometimes also known as proportional plus integral (pi) controllers. This example also begins to illustrate some challenges of.
Pid Tuning Methods Incatools from 25anfb2o6dm6dpp1r1salj17-wpengine.netdna-ssl.com Abstract— in this paper three controllers are compared: Integral control decreases its output when a negative error takes place. Disadvantages of a proportional plus integral controller. However, pi controllers handle nonlinearity poorly. P controllers have the following disadvantages: These pid controller modes have distinct advantages and disadvantages and consequences if one mode dominates. It tends to make the system unstable because it responds slowly towards the produced error. Flcs have the ability to adapt with nonlinearity.
It limits the speed of response and affects the stability of the system.
Integral action tends to increase the oscillatory or rolling. The advantages are that it helps control the water's level easily and safely. Flcs have the ability to adapt with nonlinearity. However, pi controllers handle nonlinearity poorly. Pi controllers are sensitive to parameter variations inherent in real plant operations.
Advantages And Disadvantages Of Fuzzy Logic Control Techniques Download Table from www.researchgate.net Integral action tends to increase the oscillatory or rolling. However, pi controllers handle nonlinearity poorly. It limits the speed of response and affects the stability of the system. Combinations like pi and pd controls are very often used in practical applications. Pi controller has zero steady state error. Three basic controller modes are proportional controller, integral controller, and derivative controller. The block calculates the control signal using the backward euler discretization method I hope my answer proved helpful.
Thus, pi controllers provide a balance of complexity.
A pi controller could improve relative stability and eliminate steady state error at the same time, but the settling time is increased(system response sluggish). Pi controllers have two tuning parameters to adjust. These pid controller modes have distinct advantages and disadvantages and consequences if one mode dominates. I am probing the two signals: Three basic controller modes are proportional controller, integral controller, and derivative controller. To overcome the disadvantages of pid controllers and flc, we propose in this paper a combination between them together. Block diagram of pi controller viii. • this moving bias eliminates offset, making pi control the most widely used industry algorithm. I like making articles and blogs about raspberry pi a lot. Arduino comes with a controller, while here. Pi controllers are universally known because of their flexibility combined with the relatively easy tuning. It tends to make the system unstable because it responds slowly towards the produced error. Without automatic controllers, all regulation tasks will have to be done manually.
Without automatic controllers, all regulation tasks will have to be done manually. In this paper, the design of an optimal fuzzy gain scheduling of pi controller combines the merits of the sliding mode control and the fuzzy inference mechanism is proposed. Dominance is the drive to exert one's influence on people or events. Block diagram of pi controller viii. I hope my answer proved helpful.
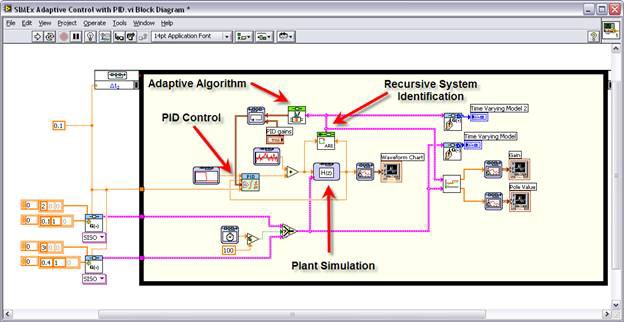
Improving Pid Controller Performance Ni from ni.scene7.com The controller takes this new error signal and computes an update of the control input. Disadvantages of proportional integral derivative controller (pid controller) for free materials of different engineering subjects use my android application named engineering funda with following link: Also the control performance is. An example of tuning a pi controller on an actual physical system can be found at the following link. Abstract— in this paper three controllers are compared: Three basic controller modes are proportional controller, integral controller, and derivative controller. Thus, pi controllers provide a balance of complexity. I like making articles and blogs about raspberry pi a lot.
The block calculates the control signal using the backward euler discretization method
However, pi controllers handle nonlinearity poorly. Nine simulation examples demonstrate that the proposed design method results in very good control for a wide variety of. Disadvantages of proportional integral derivative controller (pid controller) for free materials of different engineering subjects use my android application named engineering funda with following link: Flcs have the ability to adapt with nonlinearity. Pi controllers are universally known because of their flexibility combined with the relatively easy tuning. The advantages are that it helps control the water's level easily and safely. The controller takes this new error signal and computes an update of the control input. The block calculates the control signal using the backward euler discretization method I hope my answer proved helpful. The proper combination of a p and an i controller in parallel results in combined. Block diagram of pi controller viii. When we compare it with arduino and other boards, you get a faster processor. Abstract— in this paper three controllers are compared:
You have just read the article entitled Disadvantages Of Pi Controller : 9 2 P I D Pi Pd And Pid Control Engineering Libretexts - This application note describes the conversion from the continuous to the discrete time domain, which is essential for every implementation on a digital processor.. You can also bookmark this page with the URL : https://bricegt.blogspot.com/2021/06/disadvantages-of-pi-controller-9-2-p-i.html
Share Awesome
Belum ada Komentar untuk "Disadvantages Of Pi Controller : 9 2 P I D Pi Pd And Pid Control Engineering Libretexts - This application note describes the conversion from the continuous to the discrete time domain, which is essential for every implementation on a digital processor."


Belum ada Komentar untuk "Disadvantages Of Pi Controller : 9 2 P I D Pi Pd And Pid Control Engineering Libretexts - This application note describes the conversion from the continuous to the discrete time domain, which is essential for every implementation on a digital processor."
Posting Komentar